В MIT создали бесшумные волоконные мышцы для роботов с откликом менее 200 миллисекунд

Исследователи из MIT Media Lab совместно с итальянским Политехническим университетом Бари представили искусственные мышечные волокна, которые по силе, скорости и точности управления приближаются к естественным мышцам, при этом обходясь без громоздких моторов и внешних насосов.
Разработка опубликована в журнале Science Robotics и может изменить подход к проектированию роботов и носимых гаджетов.
Новый класс актуаторов получил название электрофлюидные волоконные мышцы (Electrofluidic Fiber Muscles, EFM). В отличие от классических робототехнических систем, опирающихся на жёсткие моторы, эти волокна сокращаются и растягиваются подобно биологическим мышцам, что делает их пригодными для безопасного взаимодействия с человеком и компактных конструкций.
Каждое волокно сочетает две технологии. Первая, тонкий актуатор Маккиббена, представляет собой мышцу, приводимую в действие жидкостью. Вторая, миниатюрный твердотельный насос на принципе электрогидродинамики, создаёт давление внутри замкнутой жидкостной системы без единой движущейся детали.
Тяжёлая, громоздкая, зачастую шумная гидравлическая инфраструктура – именно так ведущий автор работы Озгюн Килич Афсар описал главное ограничение традиционных гидравлических систем, мешающее их интеграции в мобильные и носимые устройства.
Чтобы обойти этот барьер, команда встроила насосы миллиметрового масштаба непосредственно в сами волокна.
Принцип их работы основан на введении электрического заряда в диэлектрическую жидкость, что порождает ионы, увлекающие жидкость за собой. Диаметр получившихся волоконных насосов не превышает двух миллиметров, а удельное давление достигает 900 кПа на метр. Система при этом работает практически бесшумно.
Мы интегрировали эти волоконные насосы в замкнутый жидкостный контур с тонкими актуаторами Маккиббена.
Для производства насосов используется специальный аппарат намотки множества нитей, позволяющий менять диаметр, шаг витков спиральных электродов и расстояние между парами электродов.
Ключевую идею организации мышц учёные позаимствовали у природы. Волокна расположены антагонистическими парами – одно сокращается, пока второе растягивается, точно так же, как работают бицепс и трицепс.
По словам Афсар, такая конфигурация выбрана не ради подражания биологии, а из инженерной необходимости – именно она позволяет хранить рабочую жидкость внутри самой мышцы.
Замкнутая петля из парных волокон избавила систему от внешнего резервуара с жидкостью, что долгое время мешало применять электрогидродинамические насосы в реальных роботах. Однако для стабильной работы потребовалось решить ещё одну задачу – поддержание внутреннего давления.
Волокна необходимо предварительно нагнетать, так как при слишком низком давлении возникает кавитация и образуются паровые пузыри, нарушающие работу контура.
Есть минимальное внутреннее давление в системе, ниже которого насос может деградировать или временно прекращать работу.
Для предотвращения сбоев инженеры ввели понятие смещённого давления, регулировка которого позволяет выбирать баланс между скоростью отклика и силой сокращения.
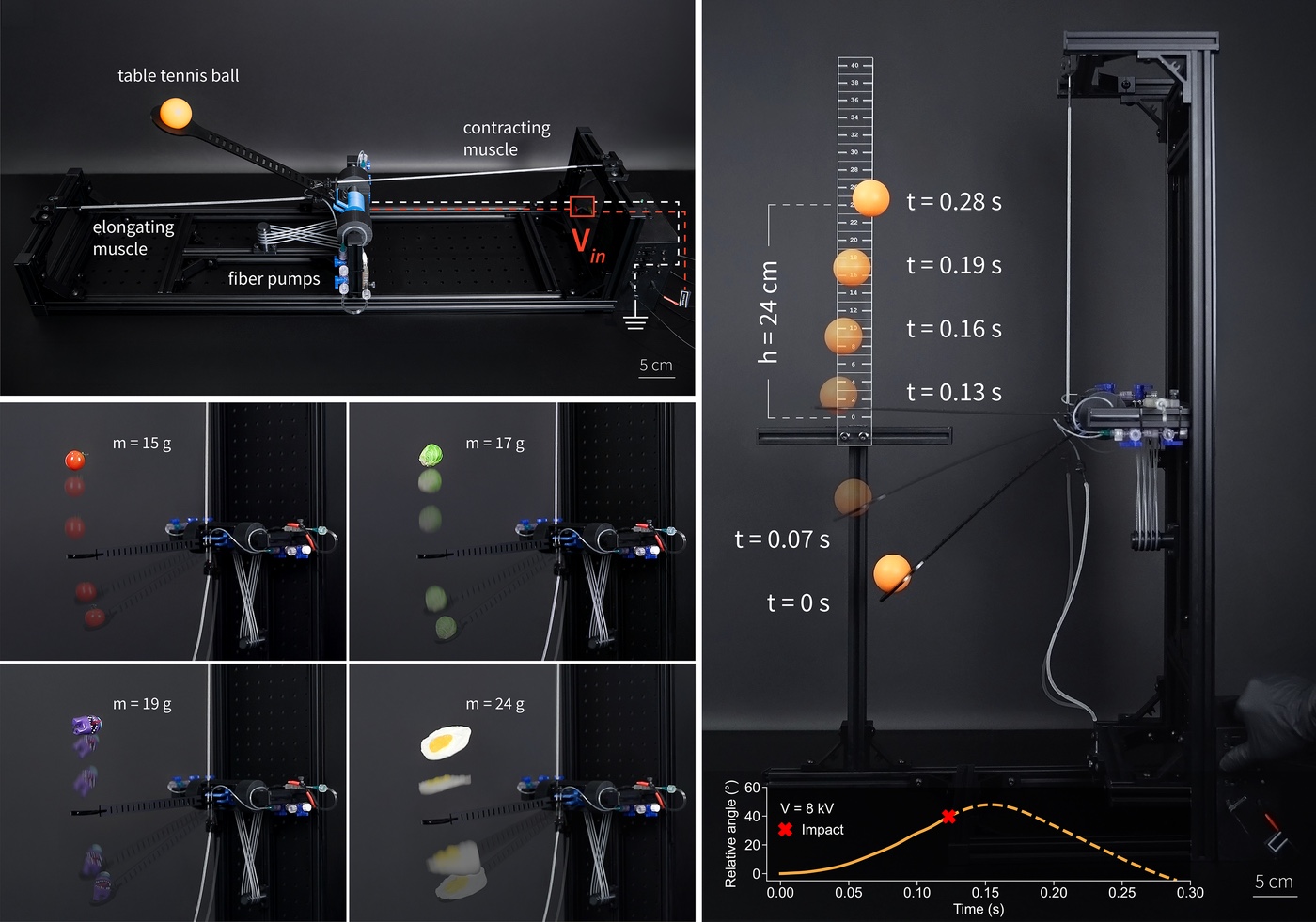
Демонстрационная установка с рычагом, соединённым с парой антагонистических актуаторов Маккиббена и четырьмя параллельно подключёнными волоконными насосами, выстреливала предметами менее чем за 200 миллисекунд.

Тонкие миллиметровые волокна можно вплетать в текстиль – команда изготовила плоские тканевые мышечные пары, сплетая актуаторы и насосы между собой. Количество элементов в такой ткани регулируется под нужное усилие и скорость срабатывания.
Разработка решает фундаментальное ограничение современной робототехники. Большинство конечностей роботов опираются на сервомоторы, создающие вращательное движение, которое затем приходится преобразовывать в линейное. "Большинство манипуляторов и человекоподобных роботов проектируются вокруг сервомоторов, которые их приводят в действие", – отметил Вито Какуччоло.
Это создаёт ограничения по компоновке, так как сервомоторы трудно упаковать плотно и они склонны концентрировать массу рядом с приводимыми ими суставами.
Волоконные мышцы, напротив, можно распределять по всей структуре, что открывает путь к более лёгким и гибким конструкциям.
Среди потенциальных областей применения разработчики называют экзоскелеты, протезы и мягкие роботизированные системы, рассчитанные на безопасное взаимодействие с человеком.

Независимые эксперты называют работу шагом вперёд для мягкой актуации, особенно благодаря бесшумной работе без движущихся частей. Проект выполнен при участии Политехнического университета Бари и при софинансировании со стороны Европейского исследовательского совета.
- Гуманоидный робот так сильно ударил по футбольному мячу, что тот пробил дыру в стене
- Рабочие индийских фабрик носят камеры на голове, чтобы научить роботов двигаться как люди
- Танцующий робот вышел из-под контроля и ударил ребёнка по лицу на глазах у толпы



