NASA разрабатывает четвероногого робота для исследования Марса

Инженеры американского космического агентства NASA работают над специальным ровером Mars Dog, который может эффективнее перемещаться по поверхности Марса. За основу взят четвероногий робот-пес Spot от Boston Dynamics.
Современные роверы имеют по четыре или шесть колес и могут перемещаться по относительно ровной местности. Инженеры NASA при содействии Исследовательского центра Эймса и Университета Макгилла решили изменить классическую концепцию.
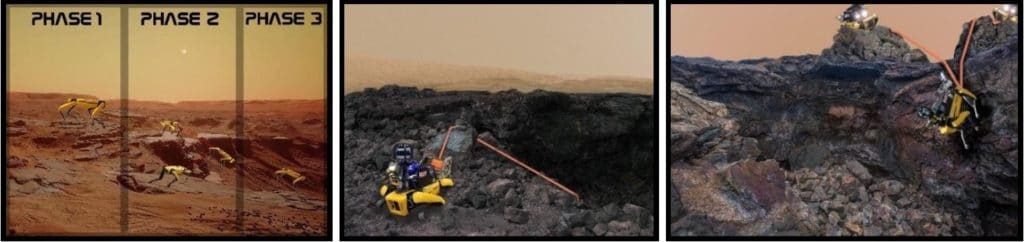
Вместо колес они планируют создать робота-собаку, которая могла бы автономно перемещаться не только по поверхности Марса, но также исследовать пещеры. Такой ровер получит систему управления NeBula, основанную на ИИ-алгоритмах.
Еще одно преимущество Mars Dog в том, что он может подняться в случае падения, тогда как обычные роверы такой способностью не обладают. В настоящее время Mars Dog тестируется и обучается преодолению различных препятствий.
Когда именно Mars Dog отправится на свою первую космическую миссию, пока неизвестно.